|
| | PSBuzz (USB *p) |
| |
| bool | connected () |
| |
| void | attachOnInit (void(*funcOnInit)(void)) |
| |
|
| bool | getButtonPress (ButtonEnum b, uint8_t controller=0) |
| |
| bool | getButtonClick (ButtonEnum b, uint8_t controller=0) |
| |
| void | setLedRaw (bool value, uint8_t controller=0) |
| |
| void | setLedOffAll () |
| |
| void | setLedOff (uint8_t controller=0) |
| |
| void | setLedOnAll () |
| |
| void | setLedOn (uint8_t controller=0) |
| |
| void | setLedToggle (uint8_t controller=0) |
| |
| | HIDUniversal (USB *p) |
| |
| virtual bool | SetReportParser (uint8_t id, HIDReportParser *prs) |
| |
| virtual uint8_t | Init (uint8_t parent, uint8_t port, bool lowspeed) |
| |
| virtual uint8_t | Release () |
| |
| virtual uint8_t | Poll () |
| |
| virtual uint8_t | GetAddress () |
| |
| virtual bool | isReady () |
| |
| virtual void | EndpointXtract (uint8_t conf, uint8_t iface, uint8_t alt, uint8_t proto, const USB_ENDPOINT_DESCRIPTOR *ep) |
| |
| | HID (USB *pusb) |
| |
| const USB * | GetUsb () |
| |
| uint8_t | SetProtocol (uint8_t iface, uint8_t protocol) |
| |
| uint8_t | GetProtocol (uint8_t iface, uint8_t *dataptr) |
| |
| uint8_t | GetIdle (uint8_t iface, uint8_t reportID, uint8_t *dataptr) |
| |
| uint8_t | SetIdle (uint8_t iface, uint8_t reportID, uint8_t duration) |
| |
| uint8_t | GetReportDescr (uint16_t wIndex, USBReadParser *parser=NULL) |
| |
| uint8_t | GetHidDescr (uint8_t ep, uint16_t nbytes, uint8_t *dataptr) |
| |
| uint8_t | GetReport (uint8_t ep, uint8_t iface, uint8_t report_type, uint8_t report_id, uint16_t nbytes, uint8_t *dataptr) |
| |
| uint8_t | SetReport (uint8_t ep, uint8_t iface, uint8_t report_type, uint8_t report_id, uint16_t nbytes, uint8_t *dataptr) |
| |
| virtual uint8_t | ConfigureDevice (uint8_t parent, uint8_t port, bool lowspeed) |
| |
| virtual void | ResetHubPort (uint8_t port) |
| |
| virtual boolean | DEVCLASSOK (uint8_t klass) |
| |
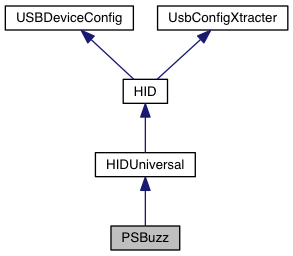
This class implements support for the PS Buzz controllers via USB. It uses the HIDUniversal class for all the USB communication.
Definition at line 43 of file PSBuzz.h.
| bool PSBuzz::getButtonPress |
( |
ButtonEnum |
b, |
|
|
uint8_t |
controller = 0 |
|
) |
| |
getButtonPress(ButtonEnum b) will return true as long as the button is held down.
While getButtonClick(ButtonEnum b) will only return it once.
So you instance if you need to increase a variable once you would use getButtonClick(ButtonEnum b), but if you need to drive a robot forward you would use getButtonPress(ButtonEnum b).
- Parameters
-
| b | ButtonEnum to read. |
| controller | The controller to read from. Default to 0. |
- Returns
- getButtonPress(ButtonEnum b) will return a true as long as a button is held down, while getButtonClick(ButtonEnum b) will return true once for each button press.
Definition at line 52 of file PSBuzz.cpp.
| bool PSBuzz::getButtonClick |
( |
ButtonEnum |
b, |
|
|
uint8_t |
controller = 0 |
|
) |
| |
getButtonPress(ButtonEnum b) will return true as long as the button is held down.
While getButtonClick(ButtonEnum b) will only return it once.
So you instance if you need to increase a variable once you would use getButtonClick(ButtonEnum b), but if you need to drive a robot forward you would use getButtonPress(ButtonEnum b).
- Parameters
-
| b | ButtonEnum to read. |
| controller | The controller to read from. Default to 0. |
- Returns
- getButtonPress(ButtonEnum b) will return a true as long as a button is held down, while getButtonClick(ButtonEnum b) will return true once for each button press.
Definition at line 56 of file PSBuzz.cpp.

 Public Member Functions inherited from HIDUniversal
Public Member Functions inherited from HIDUniversal 1.8.7
1.8.7

