#include <PS3BT.h>
|
| | PS3BT (BTD *pBtd, uint8_t btadr5=0, uint8_t btadr4=0, uint8_t btadr3=0, uint8_t btadr2=0, uint8_t btadr1=0, uint8_t btadr0=0) |
| |
|
| bool | getButtonPress (ButtonEnum b) |
| |
| bool | getButtonClick (ButtonEnum b) |
| |
| uint8_t | getAnalogButton (ButtonEnum a) |
| |
| uint8_t | getAnalogHat (AnalogHatEnum a) |
| |
| int16_t | getSensor (SensorEnum a) |
| |
| float | getAngle (AngleEnum a) |
| |
| float | get9DOFValues (SensorEnum a) |
| |
| bool | getStatus (StatusEnum c) |
| |
| void | printStatusString () |
| |
| String | getTemperature () |
| |
| void | setAllOff () |
| |
| void | setRumbleOff () |
| |
| void | setRumbleOn (RumbleEnum mode) |
| |
| void | setRumbleOn (uint8_t rightDuration, uint8_t rightPower, uint8_t leftDuration, uint8_t leftPower) |
| |
| void | setLedRaw (uint8_t value) |
| |
| void | setLedOff () |
| |
| void | setLedOff (LEDEnum a) |
| |
| void | setLedOn (LEDEnum a) |
| |
| void | setLedToggle (LEDEnum a) |
| |
| void | moveSetBulb (uint8_t r, uint8_t g, uint8_t b) |
| |
| void | moveSetBulb (ColorsEnum color) |
| |
| void | moveSetRumble (uint8_t rumble) |
| |
| uint32_t | getLastMessageTime () |
| |
| | BluetoothService (BTD *p) |
| |
| void | attachOnInit (void(*funcOnInit)(void)) |
| |
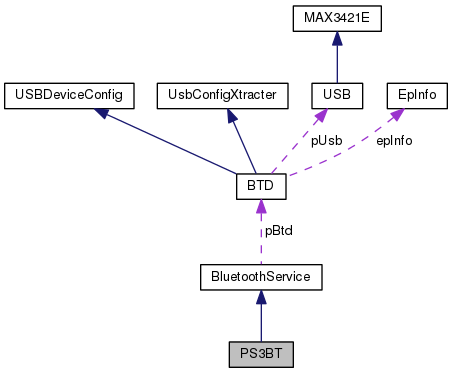
This BluetoothService class implements support for all the official PS3 Controllers: Dualshock 3, Navigation or a Motion controller via Bluetooth.
Information about the protocol can be found at the wiki: https://github.com/felis/USB_Host_Shield_2.0/wiki/PS3-Information.
Definition at line 32 of file PS3BT.h.
| PS3BT::PS3BT |
( |
BTD * |
pBtd, |
|
|
uint8_t |
btadr5 = 0, |
|
|
uint8_t |
btadr4 = 0, |
|
|
uint8_t |
btadr3 = 0, |
|
|
uint8_t |
btadr2 = 0, |
|
|
uint8_t |
btadr1 = 0, |
|
|
uint8_t |
btadr0 = 0 |
|
) |
| |
Constructor for the PS3BT class.
- Parameters
-
| pBtd | Pointer to BTD class instance. |
| btadr5,btadr4,btadr3,btadr2,btadr1,btadr0 | Pass your dongles Bluetooth address into the constructor, This will set BTD::my_bdaddr, so you don't have to plug in the dongle before pairing with your controller. |
Definition at line 23 of file PS3BT.cpp.
| void PS3BT::disconnect |
( |
| ) |
|
|
virtual |
Used to get the analog value from button presses.
- Parameters
-
| a | The ButtonEnum to read. The supported buttons are: UP, RIGHT, DOWN, LEFT, L1, L2, R1, R2, TRIANGLE, CIRCLE, CROSS, SQUARE, and T. |
- Returns
- Analog value in the range of 0-255.
Definition at line 60 of file PS3BT.cpp.
Used to read the analog joystick.
- Parameters
-
- Returns
- Return the analog value in the range of 0-255.
Definition at line 64 of file PS3BT.cpp.
Used to read the sensors inside the Dualshock 3 and Move controller.
- Parameters
-
| a | The Dualshock 3 has a 3-axis accelerometer and a 1-axis gyro inside. The Move controller has a 3-axis accelerometer, a 3-axis gyro, a 3-axis magnetometer and a temperature sensor inside. |
- Returns
- Return the raw sensor value.
Definition at line 68 of file PS3BT.cpp.
Use this to get Pitch and Roll calculated using the accelerometer.
- Parameters
-
- Returns
- Return the angle in the range of 0-360.
Definition at line 85 of file PS3BT.cpp.
Read the sensors inside the Move controller.
- Parameters
-
- Returns
- The value in SI units.
Definition at line 112 of file PS3BT.cpp.
Get the status from the controller.
- Parameters
-
- Returns
- True if correct and false if not.
Definition at line 156 of file PS3BT.cpp.
| void PS3BT::printStatusString |
( |
| ) |
|
Read all the available statuses from the controller and prints it as a nice formated string.
Definition at line 160 of file PS3BT.cpp.
| String PS3BT::getTemperature |
( |
| ) |
|
Read the temperature from the Move controller.
- Returns
- The temperature in degrees Celsius.
Definition at line 141 of file PS3BT.cpp.
| void PS3BT::setAllOff |
( |
| ) |
|
Used to set all LEDs and rumble off.
Definition at line 519 of file PS3BT.cpp.
| void PS3BT::setRumbleOff |
( |
| ) |
|
Turn on rumble.
- Parameters
-
Definition at line 540 of file PS3BT.cpp.
| void PS3BT::setRumbleOn |
( |
uint8_t |
rightDuration, |
|
|
uint8_t |
rightPower, |
|
|
uint8_t |
leftDuration, |
|
|
uint8_t |
leftPower |
|
) |
| |
Turn on rumble using custom duration and power.
- Parameters
-
| rightDuration | The duration of the right/low rumble effect. |
| rightPower | The intensity of the right/low rumble effect. |
| leftDuration | The duration of the left/high rumble effect. |
| leftPower | The intensity of the left/high rumble effect. |
Definition at line 549 of file PS3BT.cpp.
| void PS3BT::setLedRaw |
( |
uint8_t |
value | ) |
|
| void PS3BT::setLedOff |
( |
| ) |
|
|
inline |
Turn all LEDs off.
Definition at line 138 of file PS3BT.h.
Turn the specific LED off.
- Parameters
-
Definition at line 564 of file PS3BT.cpp.
Turn the specific LED on.
- Parameters
-
Definition at line 569 of file PS3BT.cpp.
| void PS3BT::setLedToggle |
( |
LEDEnum |
a | ) |
|
Toggle the specific LED.
- Parameters
-
Definition at line 578 of file PS3BT.cpp.
| void PS3BT::moveSetBulb |
( |
uint8_t |
r, |
|
|
uint8_t |
g, |
|
|
uint8_t |
b |
|
) |
| |
Use this to set the Color using RGB values.
- Parameters
-
Definition at line 604 of file PS3BT.cpp.
Use this to set the color using the predefined colors in ColorsEnum.
- Parameters
-
Definition at line 613 of file PS3BT.cpp.
| void PS3BT::moveSetRumble |
( |
uint8_t |
rumble | ) |
|
Set the rumble value inside the Move controller.
- Parameters
-
| rumble | The desired value in the range from 64-255. |
Definition at line 617 of file PS3BT.cpp.
| uint32_t PS3BT::getLastMessageTime |
( |
| ) |
|
|
inline |
Used to get the millis() of the last message
Definition at line 174 of file PS3BT.h.
| void PS3BT::ACLData |
( |
uint8_t * |
ACLData | ) |
|
|
protectedvirtual |
Called when the controller is successfully initialized. Use attachOnInit(void (*funcOnInit)(void)) to call your own function. This is useful for instance if you want to set the LEDs in a specific way.
Implements BluetoothService.
Definition at line 628 of file PS3BT.cpp.
Variable used to indicate if the normal Playstation controller is successfully connected.
Definition at line 176 of file PS3BT.h.
| bool PS3BT::PS3MoveConnected |
Variable used to indicate if the Move controller is successfully connected.
Definition at line 182 of file PS3BT.h.
| bool PS3BT::PS3NavigationConnected |
Variable used to indicate if the Navigation controller is successfully connected.
Definition at line 184 of file PS3BT.h.
The documentation for this class was generated from the following files:
 Public Member Functions inherited from BluetoothService
Public Member Functions inherited from BluetoothService 1.8.6
1.8.6

